
M415D 2 phase stepper motor driver









 Contact Us:
Contact Us:





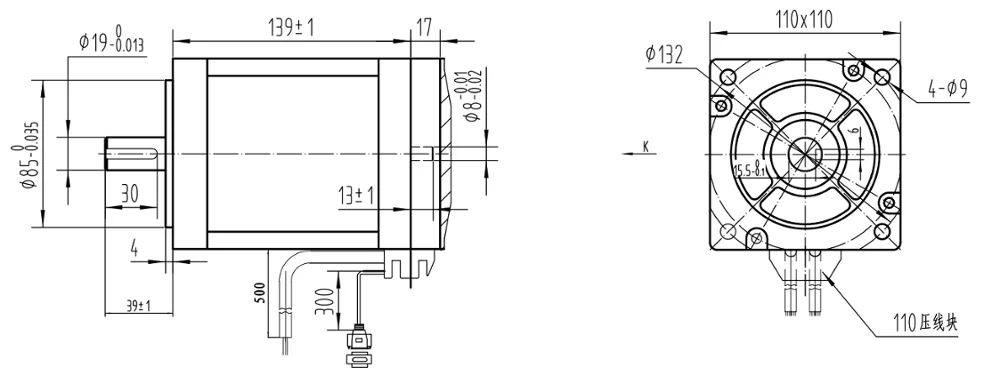
Nema 42 Closed Loop Motor Motor Eelctrical Parameters:
| Mode | Step angle | Current (A) | Resistance (Ω±10%) | Inductance | Holding torque(N.m) | Motor length(mm) | Encoder | Applicable Driver |
| (mH±20%) | Resolution(PPR) | |||||||
| 110HCE12N-B39 | 1.2° | 4.2 | 1.2 | 13 | 12 | 139 | 1000 | 3HSS2260 |
| 110HCE16N-B39 | 1.2° | 6.4 | 0.9 | 9.5 | 16 | 180 | 1000 | 3HSS2260 |
| 110HCE20N-B39 | 1.2° | 4.2 | 1.88 | 18 | 20 | 221 | 1000 | 3HSS2260 |
Motor dimension:mm
Torque/Frequency Curve
Driver 3HSS2260
Features
1, 32-bit DSP and vector closed-loop control technology
2, Without losing step, high accuracy in position
3, Improve the motor output torque and working speed
4, Variable current control technology, restrain motor temperature rise
5, Adapt to variety of mechanical load conditions(including low-rigidity pulleys), no
need to adjust the gain parameter
6, Smooth and reliable moving, low vibration, great improvement in accelerate and
decelerate
7, The ability of zero speed static without vibration
8, Adapt to 3-phase 86(NEMA34) and 110(NEMA 42) hybrid servo motor
9, Maximum step-pulse frequency 200KHZ
10, Micro step 400-60000 pulse/rev
11, Voltage range AC150-240V
12, Over current, over voltage and over position protection
13, Six digital tube display, easy to set parameters and monitor the motor running
state












