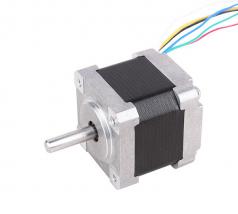
Nema14 35HM 2 phase 0.9° hybrid stepper motor









NEMA 34 stepper motor driver is one of the core components in the stepping system. It controls the motor coil current (strong current) according to the pulse/direction command (weak current signal) sent by the controller, so as to control the position and speed of the motor shaft.
There are three basic driving modes of NEMA 34 stepper motor driver: full step, half step, and subdivision. The main difference lies in the control accuracy of motor coil current (i.e. excitation mode).

1. Whole step drive
In the whole step operation, the same stepper motor can be equipped with both integral/half step driver and subdivision driver, but the operation effect is different. The stepper motor driver circularly excites the two coils of the two-phase stepper motor according to the pulse/direction command (that is, the coil charging set current). Each pulse of this driving mode will make the motor move a basic step angle, i.e. 1.80 degrees
(the standard two-phase motor has 200 step angles in one circle).
2. Half step drive
In single-phase excitation, the motor shaft stops at the full step position. After receiving the next pulse, if the driver excites the other phase and keeps the original excitation state successively, the motor shaft will move half a step angle and stop in the middle of the adjacent two full step positions. In this way, the two-phase coil is single-phase, and then the two-phase excitation stepping motor will rotate in half step mode of 0.90 degrees per pulse. All integral/half step drivers of racial can perform the full step and half step drive, which are selected by the dial switch of the driver. Compared with the full step mode, the half step mode has the advantages of twice the accuracy and less vibration at low speed. Therefore, the half step mode is generally used when the whole/half step actuator is used.
3. Subdivision drive
The subdivision drive mode has the advantages of minimal low-speed vibration and high positioning accuracy. For stepping applications that require low-speed operation (i.e. the motor shaft sometimes works below 60 rpm) or the positioning accuracy requirement is less than 0.90 degrees, subdivision drive is widely used. The basic principle is to control the two coils of the motor according to the sinusoidal and cosine steps respectively so that the distance of a step angle is divided into several subdivision steps. For example, the 16 subdivision drive mode can make the stepper motor with 200 standard steps per turn achieve the operation accuracy of 200 * 16 = 3200 steps per turn (i.e. 0.1125 °).
Dewo can provide NEMA 34 stepper motor drivers with complete specifications, superior performance, reliable quality, and favorable price.











View More(Total0)Comment Lists