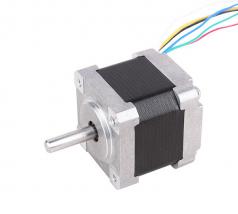
Nema14 35HM 2 phase 0.9° hybrid stepper motor









The 2 phase hybrid stepper motor is a hybrid motor. The 2 phase hybrid stepper motor consists of two parts: a stator and a rotor. A common stator has 8 poles or 4 poles, and a certain number of small teeth are evenly distributed on the pole surface; the coil on the pole can be energized in two directions. Its rotor is also composed of two tooth pieces with a certain number of small teeth uniformly distributed on the circumference. The two teeth are staggered by half a pitch. An axially magnetized annular permanent magnet is sandwiched between the two tooth plates. Obviously, all the teeth on the same segment of the rotor blade have the same polarity, while the polarities of the two different segments of the rotor blade are opposite.

The hybrid stepping motor consists of two parts: a stator and a rotor. A common stator has 8 poles or 4 poles, and a certain number of small teeth are evenly distributed on the pole surface; the coil on the pole can be energized in two directions to form A phase and universal phase, B phase and B phase. Its rotor is also composed of two tooth pieces with a certain number of small teeth uniformly distributed on the circumference. The two teeth are staggered by half a pitch. An axially magnetized annular permanent magnet is sandwiched between the two tooth plates. Obviously, all the teeth on the same segment of the rotor blade have the same polarity, while the polarities of the two different segments of the rotor blade are opposite. The structure diagram of the hybrid stepping motor is shown in Figure 3-1. Figure 3-2 is a cross-sectional model of the four-phase hybrid stepping motor spread out in a circle. The upper figure is a cross-sectional view of the S pole of the rotor, and the bottom figure is a cross-sectional view of the N pole. In the figure, the stator pitch is the same as the rotor pitch. Consider first the magnetic field below pole I and pole IB. After the stator coil is energized, the magnetic pole I produces an N pole, and the magnetic pole m produces an S pole.
Because the rotor teeth of the N pole segment and the S pole rotor teeth are staggered by half a pitch, the stator current magnetic field alone cannot produce meaningful torque like a reluctance motor. However, the situation is different if the magnetic field generated by the permanent magnet is superimposed on it. Because the two cold magnetic fields under the magnetic pole I strengthen each other, a leftward driving force is generated; and the two components under the magnetic pole m cancel each other out, and the rightward force is greatly weakened. Look at the figure below, the stator magnetic field under pole m and the rotor magnetic field have the same direction, and the direction of the magnetic field under pole I is opposite, and finally the resultant force to the left is obtained. The rotor will rotate through the tooth pitch under the action of the driving force, the driving force will be reduced to zero, and the equilibrium position will be reached.
If the excitation of magnetic poles I and III is cut off and current is applied to the coils on magnetic poles II and IV, S pole and N pole are generated respectively. The rotor will take another step to the left. Excite according to a specific time sequence, such as A-B -A -B-A-"', the motor can continuously rotate in the counterclockwise direction. Change the excitation sequence to A-B-A-B-A-... and the motor will continuously rotate in the clockwise direction.











View More(Total0)Comment Lists